|
|
 |
|
"I, Robot" Added on: Fri Nov 17 2000 |
| Page: 1 2 3 4 5 6 7 8 |
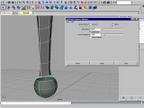
For the lower leg used the same method, except I finished it of with a combined rebuild as used for the torso. This will give a sharp edge at the front of the shinbone and a nice round effect at the backside.
For the lower arm just use a standard cylinder and "boxify" it, create the cylinder and select the viewport that lets you look into the cylinder. Then select it's cv's and scale entire rows in or out until it the circular shape is squared off. Align the upper and lower leg and arm parts and ad tweaked capped cylinders as the knee and elbow joint.
Hands and Feet
Once again basic nurbs primitives. Just use cylinders and close them off by scaling down the top and bottom cv rows.
Then collapse them by snapping the CV's onto each other. Mould them into shape and add new isopharms where needed.
The foot is one solid shape, a bent cylinder with a lot of subdivisions there where the toe joint will be.
For the hand you only need to make one shape for the palm and one shape for a finger section, duplicate this finger section two times and tweak them with a lattice. Align the pieces and your index finger is ready.
Duplicate it twice for the other fingers and once for the thumb. Because the thumb is very different I only used the two end sections. The first section is a new shape, a lot bigger and a-symmetrical.

|
 |
|
|


